[편집자 주] '김동원의 Eye-T'는 IT 소식을 직접 눈(Eye)으로 보는 것처럼 생생하게 전달하는 것을 목적으로 합니다. 유용한 IT 기술과 솔루션을 쉽고 자세하게 보여드리겠습니다.
인하대 연구팀이 화성 탐사로봇에서도 사용할 수 있는 로봇 센서 자동 보정 인공지능(AI)을 개발했습니다. 카메라나 라이다로 촬영하는 대상이 모래 폭풍 속에 있더라도 정확한 센서 보정이 가능한 기술입니다.
인하대 스파로랩(SPAROLAB) 연구팀이 지난달 23일 발표한 ‘마스칼리브(MARSCalib)’는 공 모양의 표지물을 이용해 다중 로봇 시스템의 라이다-카메라 외부 보정을 자동으로 수행하는 AI 기술입니다. 기존 방식과 달리 손상된 환경에서도 안정적으로 작동해 우주 탐사는 물론 자율주행차 분야에서도 혁신을 가져올 전망입니다.
◇ 손상된 타겟에서도 정확도 95% 달성
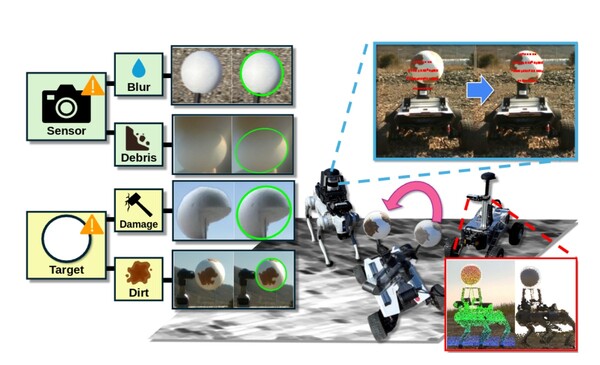
지금까지 로봇 센서 보정은 완벽한 체커보드나 특수 패턴을 필요로 했습니다. 하지만 실제 야외나 우주 환경에서는 모래, 먼지, 충격으로 인해 촬영 대상이 쉽게 손상되는 문제가 있었습니다. 마스칼리브는 바로 이런 현실적인 문제를 해결할 수 있는 AI입니다.
인하대 스파로랩의 정석환, 김호균 연구팀이 아카이브(arXiv)에 발표한 논문 ‘마스칼리브: 야외 및 우주 환경에서 다중 로봇, 자동, 견고한 구형 타겟 기반 외부 보정(MARSCalib: Multi-robot, Automatic, Robust, Spherical Target-based Extrinsic Calibration in Field and Extraterrestrial Environments)’에 따르면, 마스칼리브은 기존 방법들보다 훨씬 견고한 성능을 보였습니다. 특히 타겟이 50% 이상 손상된 상황에서도 95% 이상의 보정 정확도를 유지했습니다.
구체적인 성능 지표도 인상적입니다. 마스칼리브은 3가지 타입의 라이다(회전형, 고체상태형, 비반복형)와 3가지 카메라 위치에서 모두 안정적인 성능을 보였습니다. 행성 테스트 환경과 야외 환경에서 진행된 실험에서 기존 타겟 기반 방법들을 크게 앞섰습니다.
연구팀의 분석 결과, 공 모양 표지물의 효과는 손상 정도에 따라 차등적으로 나타났습니다. 완전한 구체에서는 기존 방법과 비슷한 성능을 보였지만, 손상이 증가할수록 마스칼리브의 우수성이 더욱 두드러졌습니다. 특히 SAM(Segment Anything Model)을 활용한 이미지 분해 기법은 손상된 영역을 정확히 구분해 처리할 수 있었습니다. SAM은 메타에서 개발한 이미지 분할 AI로, 사용자가 클릭 한 번만 하면 이미지에서 원하는 객체를 자동으로 찾아 분리해주는 기술입니다.
마스칼리브은 다양한 환경 조건에서도 높은 성능을 유지했습니다. 모래폭풍이 부는 사막 환경, 우주선 착륙장의 분진 환경, 심지어 표지물이 부분적으로 가려진 상황에서도 안정적인 보정이 가능했습니다.
◇ SAM과 계층적 가중합으로 견고성 극대화
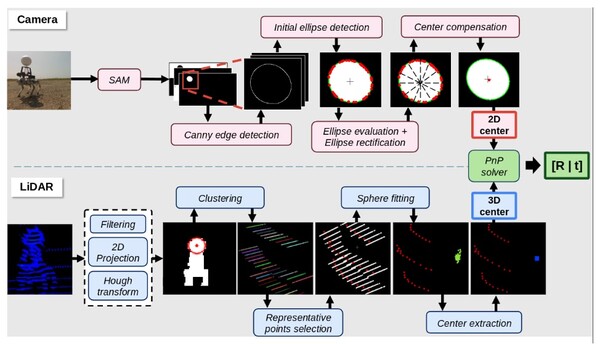
마스칼리브의 핵심은 두 개의 정교한 파이프라인입니다. 카메라 파이프라인에서는 SAM이 이미지를 90~100개의 후보 마스크로 분해하고, 새로운 알고리즘이 손상된 구체에서도 정확한 타원을 추출합니다. SAM 기술 덕분에 작고 손상되거나 오염된 타겟 영역도 안정적으로 구분할 수 있습니다. 라이다 파이프라인에서는 통계적 이상치 제거 필터와 허프(Hough) 변환을 통해 노이즈가 심한 포인트클라우드에서도 구체를 찾아냅니다.
스파로랩 연구팀은 원근 투영 모델로 인한 오차까지 보정하는 알고리즘을 개발했습니다. 이미지에서 보이는 타원의 중심과 실제 구체의 3D 중심이 다른 문제를 수학적으로 해결한 것입니다.
마스칼리브의 라이다 처리는 더욱 정교합니다. 구체 표면의 포인트들을 2mm 셀로 나누고, 각 셀의 위치와 포인트 개수를 가중치로 사용해 대표점을 계산합니다. 그다음 4개의 비동평면점 조합으로 구체를 피팅하고, 모든 조합의 중심점을 가중 평균해 최종 구체 중심을 구합니다.
기존 연구들이 사용한 랜삭(RANSAC)이나 단순 LSQ 회귀와 달리, 마스칼리브은 다층적 접근법으로 노이즈를 효과적으로 제거할 수 있습니다. 또한 다중 로봇 환경을 고려해 동시에 여러 로봇의 센서를 보정할 수 있도록 설계됐습니다.
알고리즘 검증도 흥미로운 결과를 보여줬습니다. 완전한 타원에서는 각도 기반 히스토그램이 균등하게 분포했지만, 손상된 타겟에서는 특정 영역에 클러스터링되는 패턴을 보였습니다. 마스칼리브은 이런 패턴을 학습해 진짜 구체와 가짜 객체를 구분할 수 있습니다.
◇ 자율주행과 우주 탐사의 새로운 가능성
마스칼리브는 인하대의 로봇 공학 전략에서 핵심 기술입니다. 스파로랩은 공간 AI와 로봇 기술을 전문으로 하는 연구실로, 슬램(SLAM), 장소 인식, 다중 로봇 시스템 연구를 병행하고 있습니다. 마스칼리브은 여기에 센서 융합의 완성도를 더합니다.
실제 적용 시나리오는 광범위합니다. 자율주행차에서는 주행 중 센서 오차가 누적되더라도 도로변 구형 표지판을 이용해 실시간으로 재보정할 수 있습니다. 건설 현장에서는 다수 작업 로봇들이 각자의 센서를 자동으로 맞춰 협업할 수 있습니다.
우주 탐사 분야에 미칠 파급효과도 기대됩니다. 현재 화성 탐사로봇들은 지구에서 미리 보정된 센서로만 작업할 수 있습니다. 하지만 마스칼리브 기술이 적용되면 화성 표면에서도 탐사로봇이 스스로 센서를 재보정해 더 정확한 탐사가 가능해집니다. 일례로 화성의 모래폭풍으로 센서가 오염되더라도 착륙선 근처에 설치된 구형 타겟을 이용해 자동으로 보정할 수 있습니다.
논문에서 연구팀은 “다중 로봇 시스템에서 타겟과 센서 손상을 모두 고려한 최초의 견고한 보정 방법”이라고 밝혔습니다. 이는 테슬라의 비전 중심, 구글 웨이모의 라이다 중심 전략과 차별화되는 ‘센서 융합 최적화’ 전략입니다. 다만 구형 타겟의 제작과 설치 비용, 그리고 극한 환경에서의 내구성 확보라는 실용적 과제도 남아 있습니다.