고려대는 차영수 전기전자공학부 교수 연구팀이 급경사와 울퉁불퉁한 지면도 자유롭게 이동하는 로봇을 개발했다고 29일 밝혔다.
바퀴형 로봇(Wheel Robot)은 인공지능과 정밀 제어 기술의 발전에 따라 운송, 감시, 탐사 등 다양한 분야에서 활용되고 있다. 그러나 울퉁불퉁하거나 경사가 심한 지형에서는 이동이 어렵다는 한계가 있었다.
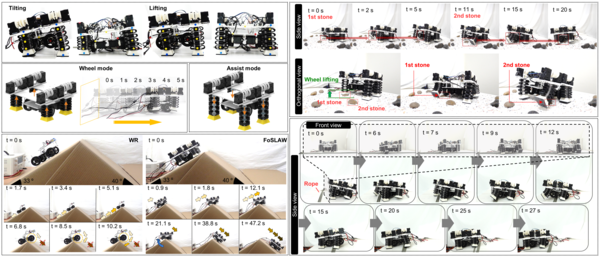
이에 연구팀은 ‘폴더블 레그 어시스턴트(Foldable Leg Assistant)’라 이름 붙인 접히는 다리형 보조 시스템을 개발했다. 이 시스템은 ‘가변 강성 구조’, 즉 외부의 힘이나 자극에 따라 딱딱함을 조절할 수 있는 구조를 활용해, 로봇이 스스로 몸체를 들어 올리거나 기울일 수 있도록 했다. 이를 통해 다리와 바퀴가 상호 보완적으로 작동하며 복합 지형을 이동할 수 있는 원리를 밝혀냈다.
연구 결과 폴더블 레그를 장착한 로봇은 로봇 높이의 약 23%까지 차체를 들어 올릴 수 있었으며, 기존 구조의 한계를 뛰어넘는 73도의 급경사도 무리 없이 통과했다. 플랫폼·자갈밭 등 다양한 지형에서 약 90%의 성공률로 안정적인 주행을 구현했다.
연구팀은 추가로, 같은 가변 강성 구조를 적용한 접히는 로봇팔에 카메라를 부착해 배수로나 협소한 틈새 등 기존 바퀴 로봇이 접근하기 어려운 지형을 탐색하는 데 활용했다. 또한 과일이나 식품처럼 형태가 일정하지 않고 쉽게 부서지는 물체를 부드럽게 잡을 수 있는 로봇핸드를 제작해 산업적 응용 가능성도 입증했다.
본 연구 성과는 융합공학 분야의 국제 저명 학술지 ‘Advanced Science’ 지난 6일 게재됐다.
차영수 고려대 교수는 “이번 연구는 부드럽고 유연한 폴더블 구조가 기존의 딱딱한 로봇이 가진 한계를 보완할 수 있음을 보여준 사례”라며 “앞으로 로봇의 기능성과 환경 적응성을 높이는 다재다능한 로봇 시스템 설계의 새로운 방향을 제시할 것으로 기대한다”라고 말했다.